Robot Collaborativi: La Nuova Frontiera dell'Integrazione tra Uomo e Macchina nello Schema Corporeo
Indice dei paragrafi
- Introduzione alla robotica collaborativa e al ruolo dell'Istituto Italiano di Tecnologia
- La ricerca di Alessandra Sciutti: obiettivo e metodologia
- Robot come estensioni del corpo umano: lo schema corporeo
- L’esperimento con robot umanoidi: particolarità e risultati
- Il 'near-hand effect' nella robotica collaborativa
- Implicazioni per la progettazione di robot secondo i nuovi risultati
- Impatto sull’innovazione scientifica e sociale
- Prospettive future della robotica collaborativa a Genova e in Italia
- Conclusioni e sintesi
Introduzione alla robotica collaborativa e al ruolo dell'Istituto Italiano di Tecnologia
Il termine robotica collaborativa identifica l’insieme di quelle soluzioni tecnologiche in cui l’interazione tra uomo e macchina non si limita all’affiancamento, ma diventa una vera e propria cooperazione. In questo scenario, emergono robot capaci di lavorare insieme agli esseri umani svolgendo compiti comuni, adattandosi ai nostri movimenti e diventando partner indispensabili in ambienti industriali, domestici e di cura.
In prima linea a livello europeo e mondiale nello sviluppo della robotica collaborativa si colloca l’Istituto Italiano di Tecnologia (IIT), con sede a Genova. Questa eccellenza italiana si distingue per la ricerca d’avanguardia, capace di tradurre in soluzioni concrete le sfide della collaborazione uomo-macchina, come dimostrato nel recente lavoro coordinato da Alessandra Sciutti, uno dei nomi di punta nel settore della robotica cognitiva.
I risultati di questa ricerca aprono un nuovo orizzonte nel rapporto tra noi e le macchine, in particolare influenzando profondamente i futuri criteri di progettazione robot collaborativi.
La ricerca di Alessandra Sciutti: obiettivo e metodologia
Guidata da Alessandra Sciutti, ricercatrice presso l’Istituto Italiano di Tecnologia, la nuova indagine nasce dalla volontà di comprendere in che modo i robot, concepiti per essere partner di lavoro dell’essere umano, possano essere integrati nella nostra percezione corporea.
L’esperimento si basa sull'osservazione di un fenomeno noto come near-hand effect, cioè la tendenza dell’attenzione visiva a concentrarsi nell’immediata prossimità della mano durante lo svolgimento di compiti collaborativi. Ma cosa succede quando la “mano” non è nostra, bensì quella di un robot?
Per rispondere a questa domanda, Sciutti e il suo team hanno strutturato una serie di test in cui i partecipanti erano chiamati ad interagire con un robot umanoide impegnato in un’attività congiunta. La chiave era valutare se – e in che modo – la presenza del robot potesse alterare l’attenzione visiva e lo schema corporeo dell’utente umano.
La metodologia utilizzata ha garantito rigore sperimentale: i partecipanti sono stati monitorati tramite sistemi di eye-tracking di ultima generazione e il protocollo è stato costruito in modo da isolare qualsiasi variabile estranea, così da poter attribuire ogni effetto osservato all’interazione stessa con il robot collaborativo.
Robot come estensioni del corpo umano: lo schema corporeo
Uno dei risultati più sorprendenti della ricerca riguarda la percezione della "mano" del braccio robotico. Dallo studio emerge chiaramente che, se il robot collabora con l’utente in un compito condiviso, la sua mano viene integrata nello schema corporeo dell’utente.
Ma cos'è lo schema corporeo? Si tratta della rappresentazione mentale che ciascuno di noi costruisce e aggiorna continuamente riguardo la posizione, il movimento e la possibilità di agire delle proprie parti del corpo. La capacità di integrare elementi esterni, come un utensile o – come in questo caso – la mano di un robot collaborativo, rappresenta una conquista scientifica di enorme portata, capace di rivoluzionare la progettazione robot collaborativi.
La ricerca conferma che il confine che separa il “me” dal “non-me” può essere ridefinito dalla tecnologia. Questo risulta particolarmente vero quando la presenza del robot viene percepita come un’estensione funzionale, sia dal punto di vista fisico che cognitivo.
L’esperimento con robot umanoidi: particolarità e risultati
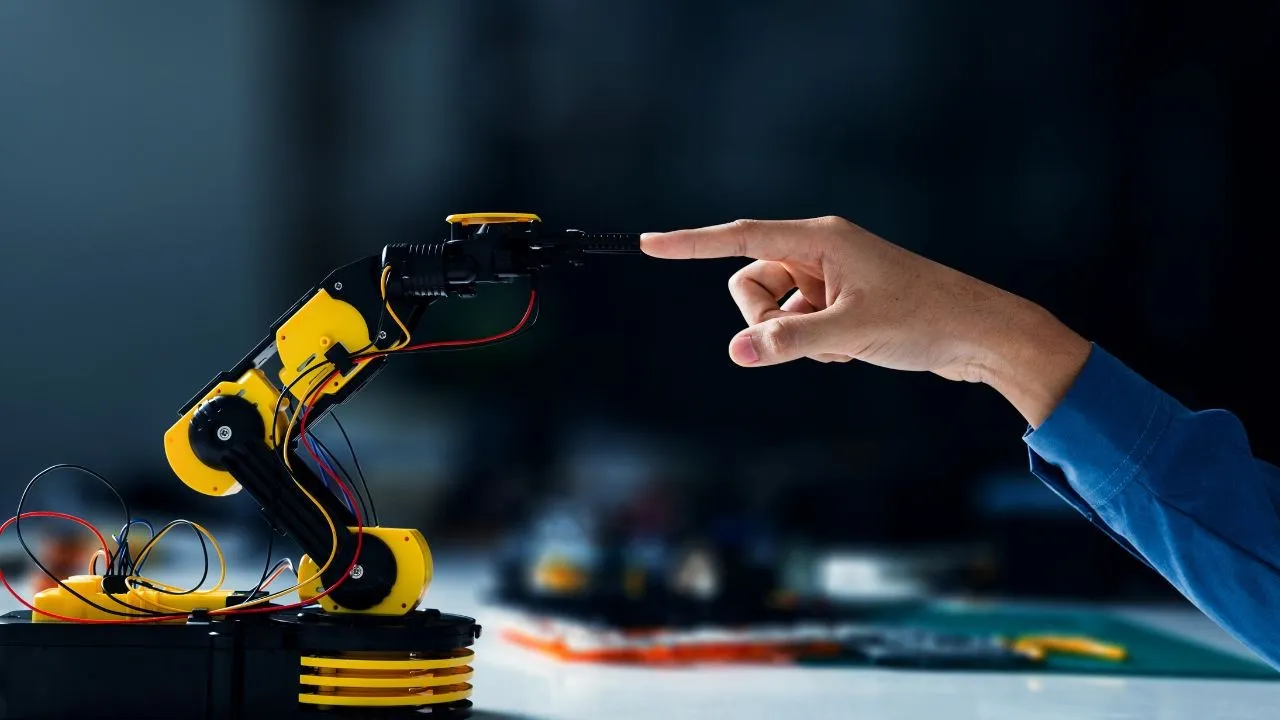
L’esperimento con robot umanoidi ha rappresentato il cuore della ricerca. I partecipanti sono stati chiamati a risolvere compiti che richiedevano una stretta collaborazione con un robot orientato all’interazione sociale. La mano del robot interveniva, sotto il controllo del sistema, in sinergia con quella dell’operatore umano per manipolare oggetti o eseguire azioni che richiedessero coordinazione visuo-motoria.
Durante l’azione congiunta, grazie alle tecnologie di tracciamento visivo, si è osservato che gli individui concentravano il proprio focus visivo non solo sulle proprie mani, ma anche – e in misura comparabile – su quella del robot. Questo comportamento, interpretato alla luce dei principi della robotica collaborativa, suggerisce che il cervello umano aggiorna il proprio modello corporeo integrando le "appendici" della macchina come fossero parte del proprio corpo.
A supporto di questa interpretazione, altri risultati hanno evidenziato un cambiamento nei tempi e nelle strategie di risposta dei partecipanti: ad esempio, gli schemi di evasione o di anticipazione del movimento mutavano a seconda della posizione della mano robotica, indicando una vera e propria assimilazione funzionale.
Il 'near-hand effect' nella robotica collaborativa
Uno degli aspetti più innovativi dello studio concerne il cosiddetto near-hand effect in ambito robotica collaborativa. Tradizionalmente, questo fenomeno descrive la spiccata tendenza dell’attenzione visiva ad aumentare intorno alle proprie mani quando si svolgono operazioni manuali di precisione. Ma la ricerca condotta dall’Istituto Italiano di Tecnologia va oltre, dimostrando che tale effetto si estende anche alla “mano” robotica se questa viene percepita – grazie al contesto collaborativo – come parte integrante del proprio corpo operativo.
La manifestazione del near-hand effect robotica non è soltanto un dettaglio di laboratorio, ma racchiude profonde implicazioni: nella misura in cui il cervello riconosce come proprie le azioni degli strumenti robotici, si spalanca la possibilità di progettare robot sempre più intuitivi e capaci di moltiplicare le nostre capacità, ridurre la fatica e persino compensare limiti funzionali o disabilità.
Inoltre, fenomeni come questi suggeriscono che l’interfaccia uomo-macchina andrà ripensata in ottica neurocognitiva, mirata cioè a stimolare questa assimilazione e a favorire sicurezza, fiducia e prestazione.
Implicazioni per la progettazione di robot secondo i nuovi risultati
L’impatto di queste scoperte sulla progettazione robot collaborativi è notevole. Se la mano del robot può essere percepita come parte dello schema corporeo umano, allora i progettisti dovranno lavorare affinché le caratteristiche fisiche, la cinetica, la reattività e persino il design sensoriale delle macchine siano ottimizzati per agevolare questa integrazione.
Ecco alcune linee guida che potrebbero emergere dalla ricerca:
- Design biomimetico: sviluppare robot dalle forme, dimensioni e modalità di movimento il più possibile simili a quelle umane per favorire l’assimilazione cognitiva.
- Interfacce intuitive: implementare feedback sensoriali (visivi, aptici, uditivi) che rinforzino la sensazione di controllo e appartenenza dell’arto robotico.
- Adattività cognitiva: sviluppare algoritmi di intelligenza artificiale capaci di riconoscere e anticipare le intenzioni dell’utente, minimizzando il gap tra azione desiderata e risposta della macchina.
Tutti questi elementi, se ben calibrati, permetteranno ai robot di diventare strumenti potenzianti, protesi o vere e proprie estensioni corporee robotiche, ampliando di fatto la nostra "sfera d’azione".
Impatto sull’innovazione scientifica e sociale
Le ricadute della ricerca condotta a Genova si proiettano ben oltre i laboratori dell’Istituto Italiano di Tecnologia. Da una parte, si aprono nuove strade per la robotica collaborativa applicata in ambiti ad alta specializzazione, come la chirurgia robot-assistita o la riabilitazione neuromotoria. Dall’altra, l’accettazione e la fiducia nella tecnologia potrebbero ricevere una spinta ulteriore laddove i robot diventano "parte" di noi, alleati anziché semplici strumenti.
Settori come l’industria manifatturiera, la domotica avanzata, i servizi dedicati agli anziani e alle persone con disabilità potrebbero essere rivoluzionati dall’adozione di robot estensione corpo umano. Un robot collaborativo – studiato secondo i principi appena illustrati – potrà aiutare l’operatore nel sollevamento di carichi pesanti, facilitare l’autonomia dei pazienti nella vita quotidiana o accompagnare la mano del chirurgo negli interventi più delicati.
Sul piano dell’innovazione robotica scientifica, l’Italia conferma la sua posizione di avanguardia mondiale. Fondendo neuroscienze cognitive, ingegneria e design, i laboratori genovesi sono destinati a fare scuola a livello internazionale per molti anni ancora.
Prospettive future della robotica collaborativa a Genova e in Italia
La robotica a Genova, Italia, si configura sempre più come un rinomato polo di eccellenza, grazie a istituzioni come l’IIT e a ricercatori della statura di Alessandra Sciutti. Guardando al futuro, ci si attendono progetti sempre più sofisticati dove l’intelligenza artificiale e le nuove tecnologie sensoriali permetteranno di aumentare ulteriormente la sinergia uomo-macchina.
Si intravedono numerose applicazioni:
- Nel settore sanitario: protesi robotiche intelligenti e sistemi di supporto per la riabilitazione.
- Nell’industria: cobot (collaborative robot) sempre più flessibili e adattivi, capaci di apprendere dai movimenti del partner umano.
- Nella formazione: strumenti di apprendimento che potenziano capacità creative ed esecutive.
- Nella vita quotidiana: assistenti personali in grado di gestire le attività domestiche, relazionandosi in modo sempre più naturale con l’utente.
Inoltre, la progettazione robot collaborativi dovrà integrare aspetti etici, di inclusività e sicurezza, ponendosi l’obiettivo di creare tecnologie che rispondano ai bisogni reali della società.
Il percorso di ricerca avviato a Genova rappresenta solo il primo passo di una trasformazione capace, nel prossimo decennio, di ridisegnare i confini del rapporto tra uomo e robot.
Conclusioni e sintesi
Lo studio firmato da Alessandra Sciutti presso l’Istituto Italiano di Tecnologia di Genova dimostra che un robot collaborativo può essere percepito come una vera e propria estensione del corpo umano, integrandosi nello schema corporeo individuale grazie all’esperienza condivisa e alla fiducia instaurata.
Il fenomeno del near-hand effect robotica amplia i confini della percezione e dell’interazione uomo-macchina, suggerendo nuove strade per la progettazione di robot intuitivi, capaci di aumentare sicurezza, efficienza e soddisfazione degli utenti. La ricaduta va ben oltre la pura innovazione tecnica, coinvolgendo industria, sanità, formazione e quotidianità.
La città di Genova e l’Italia tutta si confermano pioniere nella corsa globale per una robotica collaborativa sempre più umana, intelligente e accessibile. Queste conquiste rappresentano il primo passo verso un futuro in cui la tecnologia non solo ci assiste, ma si fonde davvero con le nostre capacità, ampliando le opportunità per individui e collettività.
Nel contesto della ricerca mondiale, il lavoro italiano sarà punto di riferimento fondamentale negli anni a venire, ispirando la progettazione, la divulgazione scientifica e l’adozione etica di nuove generazioni di robot che, ormai, iniziano davvero a far parte di noi.